Archive for the ‘CNC Mill’ Category.
February 2, 2019, 3:58 pm
Symptoms
CNC machine Z Axis drops after completing job.
Relevant
Marlin 3D Printer Firmware running on Arduino Mega with RAMPS 1.4 shield. Controlled via Pronterface.
Procedure
The steppers motors will shut down DEFAULT_STEPPER_DEACTIVE_TIME seconds after the last move when DISABLE_INACTIVE_? is true. Individual axis can be disabled or DEFAULT_STEPPER_DEACTIVE_TIME can be set to zero to stop the axis from dropping.
- Open the firmware project
- Open file Configuration_adv.h
- Change the line from#define DEFAULT_STEPPER_DEACTIVE_TIME 120to#define DEFAULT_STEPPER_DEACTIVE_TIME 0
- Upload firmware project
January 23, 2019, 10:25 am
Symptoms
CNC machine reports incorrect end stop trigger.
Relevant
Marlin 3D Printer Firmware running on Arduino Mega with RAMPS 1.4 shield. Controlled via Pronterface.
Procedure
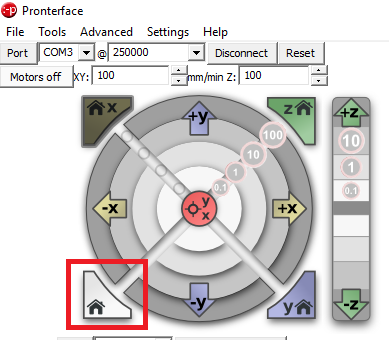
The status of the end switches can be checked using the command M119. The procedure below explains how to check the status of the switches.
- Click the Connect button

- Enter the command
M119 and then click the Send button. The command will display the status of each of the end switches. 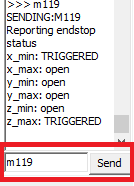
January 23, 2019, 10:03 am
January 23, 2019, 8:49 am
Symptoms
CNC machine homes in the wrong direction.
Relevant
Marlin 3D Printer Firmware running on Arduino Mega with RAMPS 1.4 shield.
Procedure
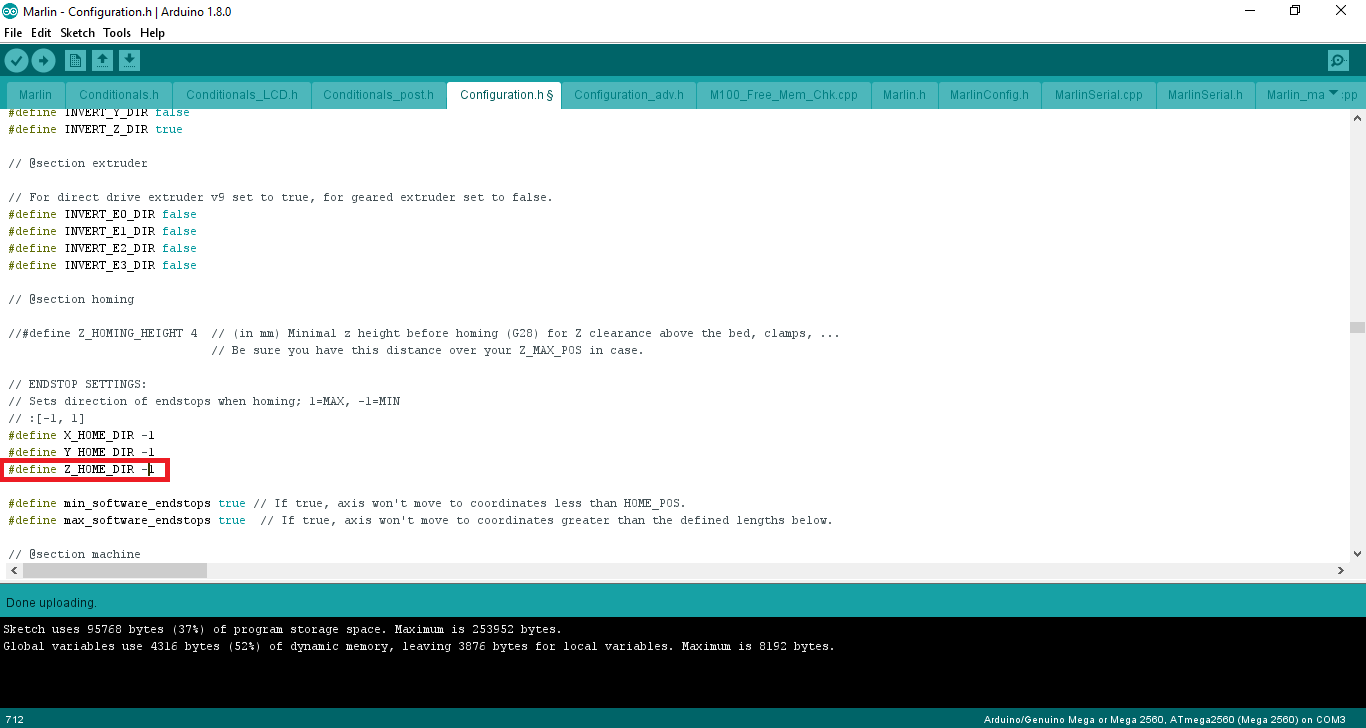
The direction of travel when homing is configured in the configuration.h using the settings X_HOME_DIR, Y_HOME_DIR and Z_HOME_DIR in the section ENDSTOP SETTINGS.
A value of -1 will set the homing direction towards the min end stop. A value of 1 will set the homing direction to the max end stop.
In the example below the homing direction for the z axis will be changed to home towards the max end stop.

The Z home value was -1 and has been changed to 1.